Building Connectivity with Confidence for Subsea Robotics
For many subsea robotics developers, acoustic communication has often been viewed as a fragile necessity—something that is “nice to have” but rarely trusted to “just work.” We believe it is time to close the gap between skepticism and reliability.
In a new two-part series on the Unet Blog, we break down exactly how to move from uncertain links to robust, mission-critical connectivity. Based on real-world deployments, this series offers a practical roadmap for AUV operators and engineers. It guides you through five levels of confidence, ensuring your vehicle’s acoustic link is dependable enough to provide reliable connectivity.
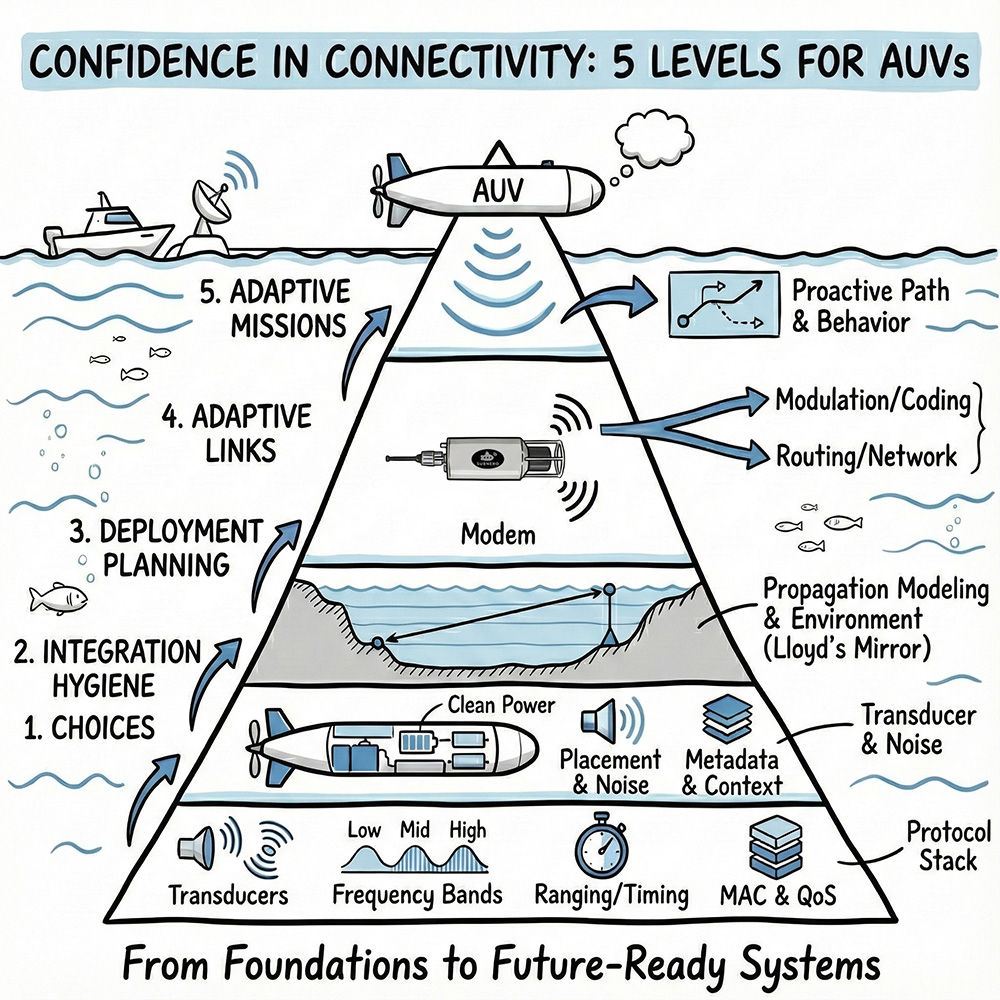 The 5-level framework for moving from basic technology choices to fully adaptive, mission-critical underwater connectivity.
The 5-level framework for moving from basic technology choices to fully adaptive, mission-critical underwater connectivity.
-
Part 1: The Foundations We cover the essential “don’ts and do’s” of acoustic systems, focusing on smart Technology Choices, rigorous Integration Hygiene (mechanical, electrical, and software), and effective Deployment Planning to avoid common environmental traps.
-
Part 2: The Advanced Edge We explore how to make your systems more aware through Adaptive Communication Links that adjust modulation in real-time and Adaptive Command & Control, where the vehicle proactively changes behavior to maintain connectivity.
Whether you are designing a new AUV or looking to improve the reliability of your current fleet, this series provides the technical insights needed to make acoustics work for you, not against you.
Read the full series here: